 English
English Español
Español  Português
Português  русский
русский  Français
Français  日本語
日本語  Deutsch
Deutsch  tiếng Việt
tiếng Việt  Italiano
Italiano  Nederlands
Nederlands  ภาษาไทย
ภาษาไทย  Polski
Polski  한국어
한국어  Svenska
Svenska  magyar
magyar  Malay
Malay  বাংলা ভাষার
বাংলা ভাষার  Dansk
Dansk  Suomi
Suomi  हिन्दी
हिन्दी  Pilipino
Pilipino  Türkçe
Türkçe  Gaeilge
Gaeilge  العربية
العربية  Indonesia
Indonesia  Norsk
Norsk  تمل
تمل  český
český  ελληνικά
ελληνικά  український
український  Javanese
Javanese  فارسی
فارسی  தமிழ்
தமிழ்  తెలుగు
తెలుగు  नेपाली
नेपाली  Burmese
Burmese  български
български  ລາວ
ລາວ  Latine
Latine  Қазақша
Қазақша  Euskal
Euskal  Azərbaycan
Azərbaycan  Slovenský jazyk
Slovenský jazyk  Македонски
Македонски  Lietuvos
Lietuvos  Eesti Keel
Eesti Keel  Română
Română  Slovenski
Slovenski  मराठी
मराठी  Srpski језик
Srpski језик


Products







trabem robot Secans Machina
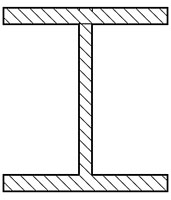
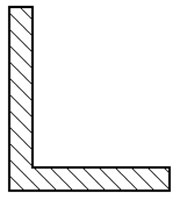
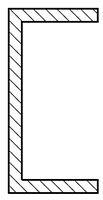
JINFENG® est professionalis Sinarum opificem et supplementum Radii Robot sectionis machinarum cum parabili pretio. Trabs Robot Secans Machinae altae sunt machinis H-trabis plasma parietum machinorum ad plasma secandum in diversis profiles ferri H trabis (I trabis), angulis, Channel cum brachio robot.
Mitte Inquisitionem
PDF Download
depictio producti
JINFENG® Est professionalis Sinis manufacturer ac elit esttrabem robot Secans Machinas Cum amet pretium. Thetrabem robot Secans Machinas altae sunt ad H-trabes plasma parietum machinis faciendis plasma incisis in diversis perfiles trabis H trabis (I trabis), angulis, Channel cum brachio robot.
PKG500
trabem robot Secans Machina
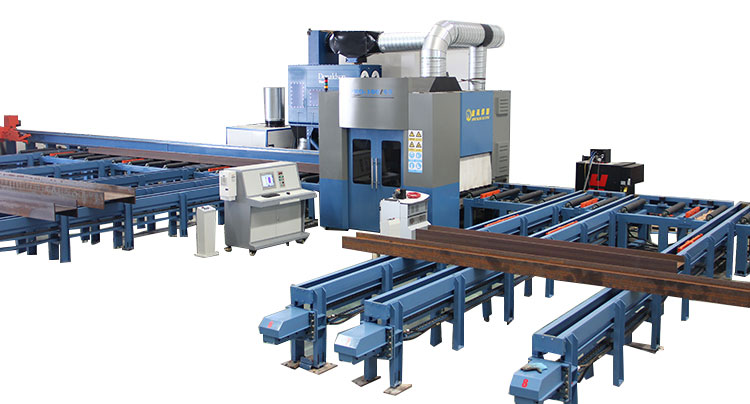
Nam omnestrabem robot Secans Machinas et plasma machinis secantibus quae JINFENG WELDCUT fabricata per 2 annos warantum habebunt, et quae cum Rollero tabulis, traductorio, pulvere spargente, plasma secantis systematis, et functiones libitum sicut dot peen notati fabrica et omnia interfaces CAD-CAM sustinent. PKGtrabem robot Secans Machinas sunt antecedens linea plasma roboticum secans ad augendam fructibus pro end-usoribus ex diversis industriis.
Specifications
|
Model |
H-trabem |
Angulus |
E-angulus |
Channel |
Longitudo |
Pondus |
|
PKG500 |
|
|
|
|
|
|
|
150* 120mm- 1000*500mm |
100* 75mm- 500* 150mm |
75* 75mm- 220*220mm |
100*50mm- 1000*500mm |
12000mm |
12T |
|
|
Suscipe Plasma incisionem, Plasma notationem, dot peen notati, programmatio CAD-CAM |
||||||

Feature Et Application
1.The PRG *trabem robot Secans Machinas est alta automatio instrumenti secantis cum ABB sex axi robot brachii inserto. Unam operationem clavem ab uno operante, linea processus automatice committitur a materiali oneratione et partibus exoneratione post plasma sectionis.
2. unus PKGtrabem robot Secans Machinas uno operator reponere potest;
Trabes diam linea
Bandsaw
Angulus Lineus
Tabula / talea processus recta
Coping Machina
Vestigium Machina
3. Linea cum systemate MES plene integrari potest et permittite remotam potestatem per speculatorem machinarum ab opifice fabricantem ut facile solvat diagnosin remotam ad solvendas difficultates per interrete sine fabrum ad locum laborantem mittendo.
3. CNC systema plenam potestatem omnium systematis principalis linearum (robot, cylindrus, mensa, TRADUCTOR crucis, plaustrum mensurans et gripper, ratio notati) ã
4.Can legere *.gen fasciculi creati ex Tribon/AM, DSTV lima e TEKLA consilio programmatis et aliis formatis exportatis.
5. hoctrabem robot Secans Machinas late usus est in constructione Ferri (plasma Trabs parietum ad fabricandas structuras structuras, pontes, ferriviaria, trailers, plaustra, scalae stringers, handrails et alia secundaria chalybea), chalybea structura et remote. Ruit.

Singula
hoc PKGtrabem robot Secans Machinas constat;
Transportatores crucis
Mensurae plaustri et gripper
Dot peen notati fabrica
Input Rollerus mensam
Robot plasma secans thalamum
Output cylindro mensam
Structure visum

Crucis TRADUCTOR â catena genus
Per crucem TRADUCTOR insertam (genus catenae) ad mensam input cylindro PKGtrabem robot Secans Machinas, H trabes aliaeque profile moveri possunt ad locum necessarium, sine grue ad periculum gruis ad 0 reducendum.

Mensurae plaustri et gripper
Pascens profile in conclavi secando simul ad longitudinem profile pastus metiendus est.

Dot peen notati fabrica
Provide permanet traceability notatione partis numeri.

Robot gazophylacium secans
Per bracchium 6 axi robotis brachii incisis intra cubiculum inauguratum ad faciendum optimum sectionem in profiles cum face plasmatis, et taeda foramina cum face oxyfuel secans.
Initus / output cylindro tables
Ex cylindro tabularum operante, machinae parietum H-tranes altas automationes consequi possunt cursus ad laborem reducendum et productionem augendam.

Crucem TRADUCTOR â unloading
Per crucem TRADUCTOR integrata ad mensam output cylindro PKGtrabem robot Secans Machinas, partes post sectionem moveri possunt ad locum necessarium, sine grue ad redigendum periculum gruis ad 0 .

Video
Hot Tags: Trabes robot Secans Machina, Sinis, Manufacturers, Suppliers, Lupum, Factory, Lorem, In Sinis, Pretium, Quality, ECA
Related Categoria
Mitte Inquisitionem
Libenter placet, ut inquisitionem tuam in forma infra exhibeas. Respondebimus tibi in 24 horis.






X
Crusulis utimur ut meliorem experientiam pasco tibi praebeamus, situm negotiationis et personalize contentus analyse. Hoc situ utendo, ad nostrum crustulorum usum consentis.
Privacy Policy